CentOS7下制作OpenSSH 8.5p1 RPM包
本文共 563 字,大约阅读时间需要 1 分钟。
1、下载资源
openssh8.5版本源码包:
openssh-8.5p1.tar.gz
地址:
x11-ssh-askpass-1.2.4.1.tar.gz
地址:
2、创建目录
mkdir /root/rpmbuild
mkdir /root/rpmbuild/{SOURCES,SPECS}

3、安装必要的依赖包
yum install rpm-build zlib-devel openssl-devel gcc perl-devel pam-devel
4、修改openssh.spec文件
tar -zxf openssh-8.4p1.tar.gz -C /opt
cp /opt/openssh-8.5p1/contrib/redhat/openssh.spec /root/rpmbuild/SPECS/ chown sshd:sshd /root/rpmbuild/SPECS/openssh.spec注释掉如下一行:
#BuildRequires: openssl-devel < 1.1
保存退出。
5、执行打包
cd /root/rpmbuild/SPECS/
rpmbuild -ba openssh.spec
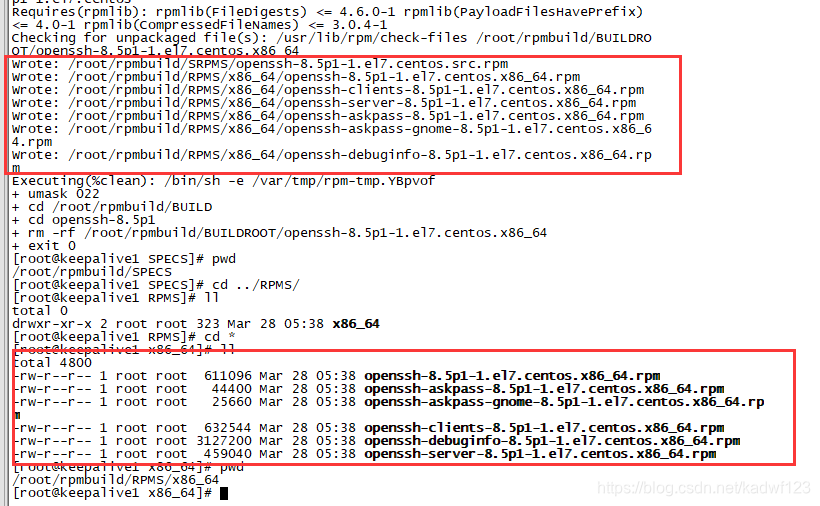
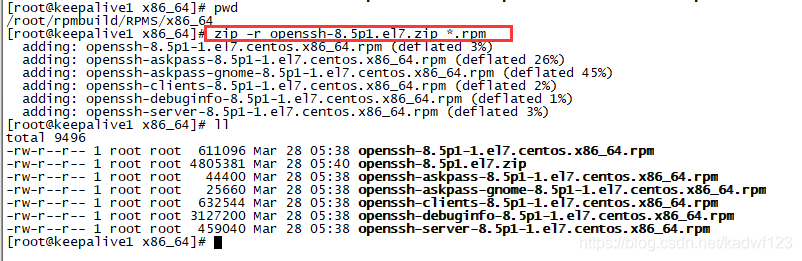
6、打包rpm包
zip -r openssh-8.5p1.el7.zip *.rpm
转载地址:http://qmljz.baihongyu.com/
你可能感兴趣的文章